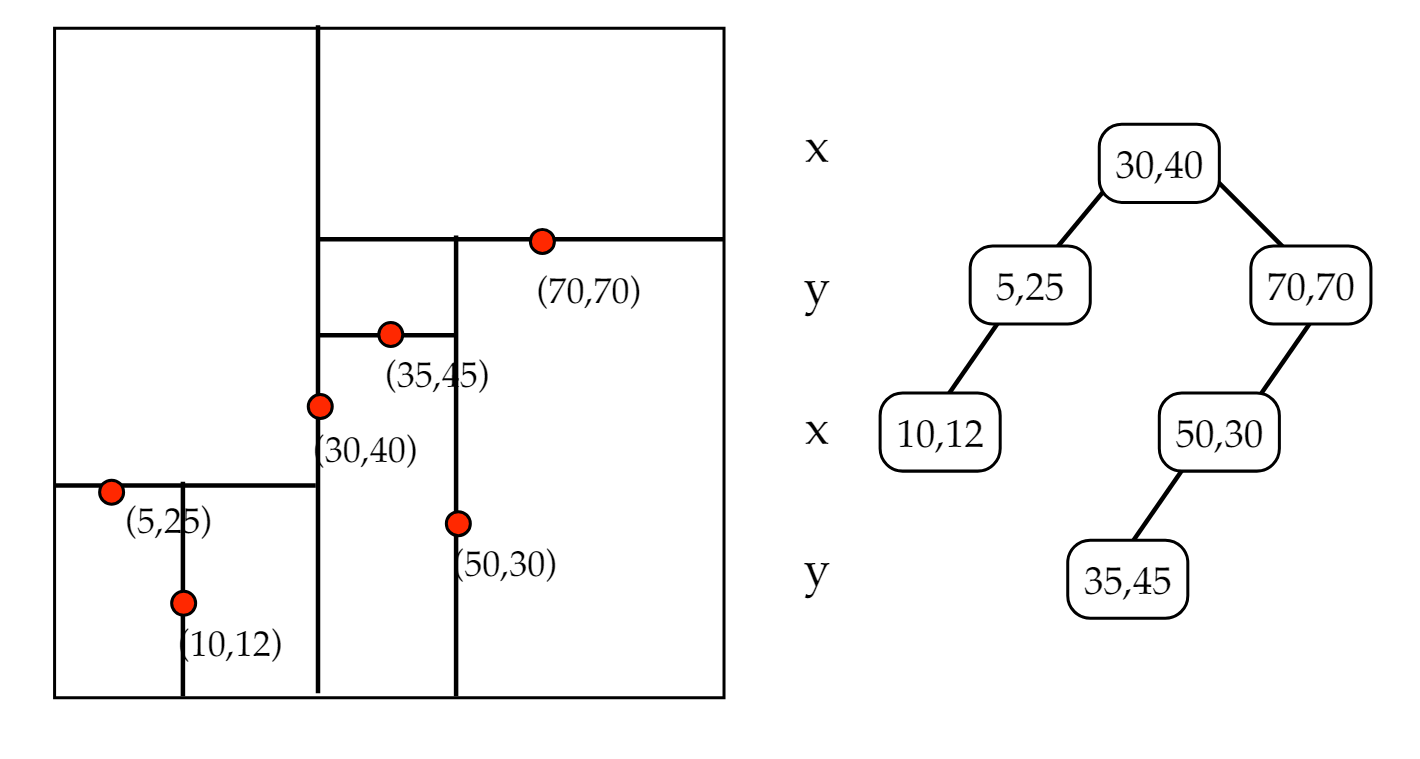
什么是KDTree KDTree 是一种树数据结构,用于存储多维数据,是二叉搜索树(BST)的推广,广泛应用于查询操作。KDTree表示数据的维数必须全部相同,KDTree是每个节点都为k维点的二叉树。所有非叶子节点可以视作用一个超平面把空间分割成两个半空间。节点左边的子树代表在超平面左边的点,节点右边的子树代表在超平面右边的点。选择超平面的方法如下:每个节点都与k维中垂直于超平面的那一维有关。因此,如果选择按照x轴划分(如图1 (30,40节点),所有x值小于30的节点都会出现在左子树,所有x值大于等于30的节点都会出现在右子树。这样,超平面可以用该x值来确定,其法线为x轴的单位向量。下一层,按照y轴划分(如图1 (5, 25节点),所有y值小于25的节点放在左子树,大于25的放在右子树。以此类推,KDTree根据深度选择分割超平面,设深度为level,数据维数为dim。则分割超平面用第level % dim维的值来确定。图2是三维KDTree。
图1 二维KDTree
图2 三维KDTree
KDTree的运算 建树 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 struct Node { double coordinate[DIM]; Node (double coordinate[]) { for (int i = 0 ; i < DIM; i++){ this ->coordinate[i] = coordinate[i]; } } Node () { for (int i = 0 ; i < DIM; i++) { this ->coordinate[i] = 0 ; } } bool operator == (const Node & node) { for (int i = 0 ; i < DIM; i++) { if (this ->coordinate[i] != node.coordinate[i]) { return false ; } } return true ; } friend std::ostream& operator << (std::ostream& os, Node node) { os << "(" ; for (int i = 0 ; i < DIM; i++) { os << node.coordinate[i] << " " ; } os << ")" ; return os; } }; struct kdNode { Node data; kdNode* left, *right; kdNode () : left (nullptr ), right (nullptr ) {}; kdNode (const Node node, kdNode* L = nullptr , kdNode* R = nullptr ) { data = node; left = L; right = R; } };
插入 插入操作和BST类似,只不过比较的是第level % dim维的值。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 kdNode* insert (Node x, kdNode* t, int cd) { if (t == nullptr ){ t = new kdNode (x); } else if (x == t->data) { return nullptr ; } else if (x.coordinate[cd] < t->data.coordinate[cd]) { t->left = insert (x, t->left, (cd + 1 ) % DIM); } else { t->right = insert (x, t->right, (cd + 1 ) % DIM); } return t; }
寻找最小值 寻找最小值定义为:寻找在第d维值最小的点。
如果当前搜索维数 == d,则根据KDTree性质,最小值不可能在右子树。判断左子树是否存在,若存在,递归搜索左子树;若不存在,返回根节点。
如果当前搜索维数 != d, 则最小值可能在左子树,根节点或右子树,递归搜索,最后从三个结果中选取最小值。1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 Node* findmin (kdNode *T, int dim, int cd) { if (T == nullptr ) { return nullptr ; } if (cd == dim) { if (T->left == nullptr ) { return &T->data; } else { return findmin (T->left, dim, (cd + 1 ) % DIM); } } else { Node* a= findmin (T->left, dim, (cd + 1 ) % DIM); Node* b = findmin (T->right, dim, (cd + 1 ) % DIM); Node* c = &T->data; return minnum (a, b, c, cd); } } Node* minnum (Node* node1, Node* node2, Node* node3, int cd) { Node* minNode = nullptr ; int minCoordinate = std::numeric_limits<int >::max (); if (node1 != nullptr && node1->coordinate[cd] < minCoordinate) { minNode = node1; minCoordinate = node1->coordinate[cd]; } if (node2 != nullptr && node2->coordinate[cd] < minCoordinate) { minNode = node2; minCoordinate = node2->coordinate[cd]; } if (node3 != nullptr && node3->coordinate[cd] < minCoordinate) { minNode = node3; minCoordinate = node3->coordinate[cd]; } return minNode; }
删除 步骤:
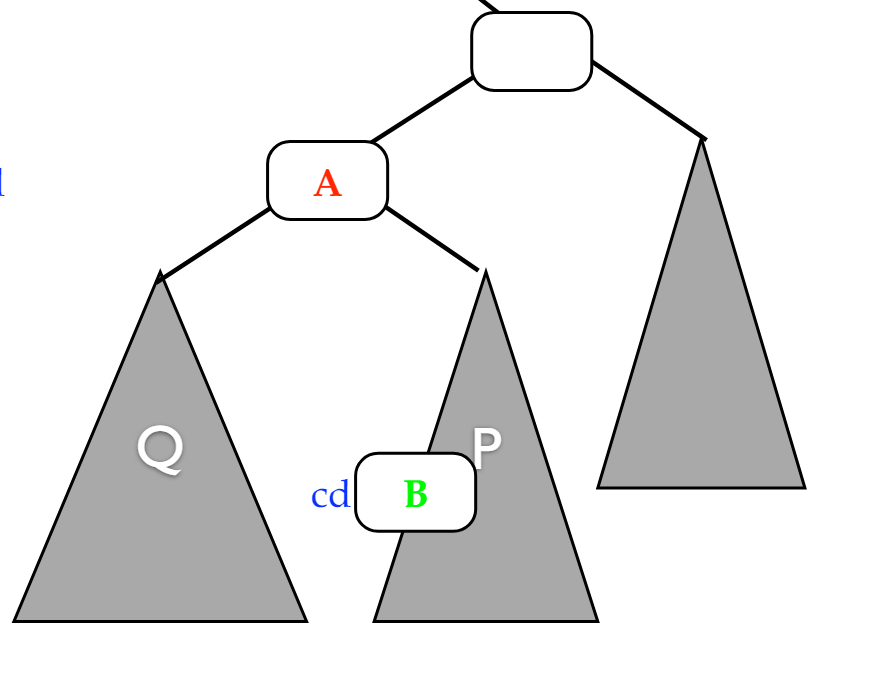
设待删节点为A, 当前所处于第d维。
如果待删节点右子树存在,搜索右子树d维最小值节点B,替换节点A,如此左子树所有节点第d维数据均小于节点B,右子树所有节点第d维数据均大于等于节点B(如图3)。
如果待删节点左子树存在,右子树不存在,交换左右子树,同上。
如果子树为空,则为叶子节点,直接删除
图3
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 kdNode* delete_node (Node x, kdNode* t, int cd) { int next_cd = (cd + 1 ) % DIM; if (t == nullptr ){ cout << "error" ; return t; } if (x == t->data) { if (t->right != nullptr ) { t->data = *findmin (t->right, cd, next_cd); t->right = delete_node (t->data, t->right, next_cd); } else if (t->left != nullptr ) { t->data = *findmin (t->left, cd, next_cd); t->right = delete_node (t->data, t->left, next_cd); t->left = nullptr ; } else { t = nullptr ; } } else { if (x.coordinate[cd] < t->data.coordinate[cd]) { t->left = delete_node (x, t->left, next_cd); }else { t->right = delete_node (x, t->right, next_cd); } } return t; }
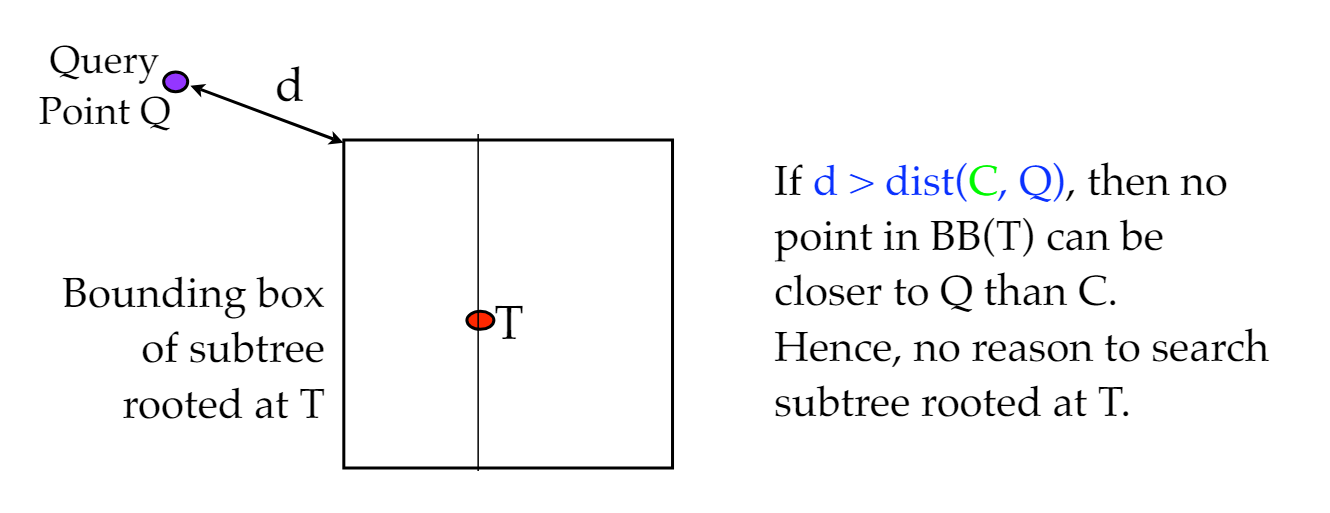
最近邻搜索 定义:最邻近搜索用来找出在树中与输入点(Qurey)最接近的点。注意:空间中的最近点,可能在树中距离远。
方法:
维持一个最近节点C,最近距离d,搜索节点时定义边界框,当边界框中所有节点最近距离不可能小于d时,剪枝(如图4)。
以最大化剪枝机会的顺序搜索。
图4
首先定义边界框Rect类
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 struct Rect { double mincoords[DIM]; double maxcoords[DIM]; Rect (double mincoords[], double maxcoords[]){ for (int i = 0 ; i < DIM; i++){ this ->mincoords[i] = mincoords[i]; this ->maxcoords[i] = maxcoords[i]; } } Rect trimleft (int cd, double value) { double new_coords[DIM]; for (int i = 0 ; i < DIM; i++){ new_coords[i] = maxcoords[i]; } new_coords[cd] = value; return Rect (mincoords, new_coords); } Rect trimright (int cd, double value) { double new_coords[DIM]; for (int i = 0 ; i < DIM; i++){ new_coords[i] = mincoords[i]; } new_coords[cd] = value; return Rect (new_coords, maxcoords); } };
搜索函数
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 Node* best_node = nullptr ; double best_distance = DBL_MAX; void search_neighbor (Node* query, kdNode* T, int cd, Rect BB) if (T == nullptr || ((distance (query, new Node (BB.mincoords)) > best_distance) && (distance (query, new Node (BB.maxcoords)) > best_distance))){ return ; } double dist = distance (query, &T->data); if (dist < best_distance) { best_distance = dist; best_node = &T->data; } if (query->coordinate[cd] < T->data.coordinate[cd]) { search_neighbor (query, T->left, (cd + 1 ) % DIM, BB.trimleft (cd, T->data.coordinate[cd])); search_neighbor (query, T->right, (cd + 1 ) % DIM, BB.trimright (cd, T->data.coordinate[cd])); } else { search_neighbor (query, T->right, (cd + 1 ) % DIM, BB.trimright (cd, T->data.coordinate[cd])); search_neighbor (query, T->left, (cd + 1 ) % DIM, BB.trimleft (cd, T->data.coordinate[cd])); } }
sklearn实现
1 2 3 4 5 6 7 8 import numpy as npfrom sklearn.neighbors import KDTreerng = np.random.RandomState(0 ) X = rng.random_sample((10 , 3 )) tree = KDTree(X, leaf_size=2 ) dist, ind = tree.query(X[:1 ], k=3 ) print (ind) print (dist)
处理高维数据 维数灾难让大部分的搜索算法在高维情况下都显得花俏且不实用。 同样的,在高维空间中,k-d树也不能做很高效的最邻近搜索。一般的准则是:在k维情况下,数据点数目N应当远远大于${\displaystyle 2^{k}}$时,k-d树的最邻近搜索才可以很好的发挥其作用。不然的话,大部分的点都会被查询,最终算法效率也不会比全体查询一遍要好到哪里去。另外,如果只是需要一个足够快,且不必最优的结果,那么可以考虑使用近似邻近查询的方法。